
创作高质量SEO文章,一键生成多场景AI文案神器:Craftly AI工具
Craftly AI:高评价SEO文案AI神器!快速提升文案质量,轻松搞定各种写作场景。免费体验,助你高效创作优质内容!
LOADING
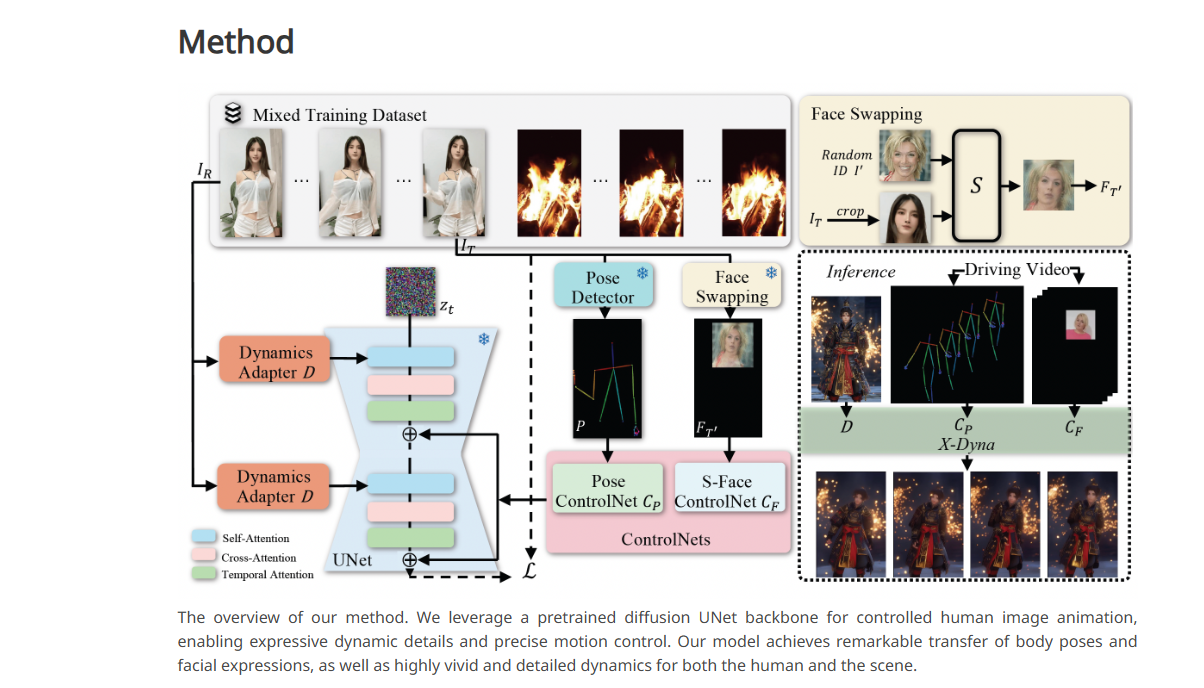
X-Dyna 是一个开源的高性能动态模拟与建模框架,专为 AI、机器人和物理仿真领域设计。它提供构建复杂动态系统模型、执行高精度物理模拟及集成控制算法的能力, acceleration of research and development processes in dynamic environments. 立即探索 X-Dyna 的潜力!
利用 X-Dyna,研究人员和开发者可以轻松创建逼真的动态环境,用于训练 AI 智能体或验证控制策略。该项目兼具效率、灵活性和准确性,是推动机器人技术、强化学习和计算物理等领域进步的有力工具。
动态系统建模: 提供工具和接口,用于构建包含关节、质量、传感器等元素的复杂动态系统模型。
物理模拟引擎: 执行高精度、高性能的物理学模拟,包括刚体动力学、碰撞检测等。
控制算法集成: 方便集成和测试各种经典的或基于学习的控制策略。
AI/强化学习环境接口: 提供与主流 AI 和强化学习框架兼容的接口,作为训练环境。
数据可视化: 支持对模拟过程和结果进行可视化展示。
模块化设计: 框架结构清晰,易于扩展新的模型组件或功能。
高性能与效率: 针对复杂动态系统的模拟进行了优化,能够快速运行大规模仿真。
灵活性与可定制性: 模块化架构允许用户根据特定需求定制模型和功能。
开源免费: 代码完全开放,降低了使用门槛,促进了社区协作和技术透明。
AI/RL 友好: 特别设计了便于与人工智能,尤其是强化学习算法结合的接口。
物理精度: 提供可信赖的物理模拟结果,适用于科学研究和工程验证。
活跃的研究背景: 源自学术机构的研究项目,通常融合了最新的技术和方法。
机器人研究人员和工程师: 进行机器人运动规划、控制算法开发、系统仿真与验证。
人工智能研究人员: 构建基于物理的强化学习环境,训练和测试 AI 智能体。
物理模拟工程师: 进行复杂的工程系统或物理现象的高精度仿真。
控制系统研究者: 设计和验证各种控制算法在动态系统上的表现。
学生和教育工作者: 作为学习动态系统、机器人学、AI 仿真相关课程的实践平台和教学工具。
涉及自动化、工业仿真、虚拟现实或计算物理的企业和团队。
访问 X-Dyna 在 GitHub Pages 上的项目网站,浏览项目概述和特色介绍。
通过网站上提供的链接,导航到 X-Dyna 的 GitHub 仓库主页。
仔细阅读仓库中的 README 文件,获取关于项目、安装步骤、依赖要求和基本使用方法的详细说明。
使用 Git 命令行工具或其他方式,将项目代码克隆 Clone 到您的本地开发环境。
按照 README 中的指示,安装所有必要的软件依赖项并进行项目编译。
运行仓库中提供的示例 Example 或 Demo,初步了解框架的功能和使用方式。
参考项目的文档 可能在网站或仓库中找到 ,学习如何构建您自己的动态模型或集成您的控制/AI 代码。
参与项目的 Issue 区或 Discussions 区进行提问、报告问题或与其他用户交流。
推荐指数: ★★★★☆
打分理由: X-Dyna 作为一个开源的高性能动态模拟与建模框架,在机器人、AI/RL 和物理仿真等领域提供了重要的技术基础。其开源特性、针对动态系统的优化性能以及对 AI 集成的友好性,使其成为相关领域研究人员和开发者的有力工具。它为构建复杂仿真环境和验证算法提供了高效灵活的平台。虽然作为一个研究导向的项目,其文档或用户支持体系可能不如商业软件完善,且需要一定的技术背景才能充分利用,但其在特定领域的价值和潜力使其获得四星推荐。
本站当拿AI导航提供的X-Dyna:开源AI动态框架,生成逼真虚拟人都来源于网络,不保证外部链接的准确性和完整性,同时,对于该外部链接的指向,不由当拿AI导航实际控制,在2025年4月26日 下午12:29收录时,该网页上的内容,都属于合规合法,后期网页的内容如出现违规,可以直接联系网站管理员进行删除,当拿AI导航不承担任何责任。

